The project aims are (A) to investigate soft magnetic hybrid materials consisting of magnetic particles suspended in a highly elastic matrix, which is partly or wholly made of thermoplastic components, and (B) to exploit the advantages of their magnetically reversibly changeable properties in prototype solutions for soft robotic applications.
The visionary goal of the investigations is on enabling adaptive mechanical compliance of technical functional elements, such as compliant actuators and structures. It pursues the idea that by using these ‘intelligent’ materials, the performance of compliant systems can be significantly improved in comparison to systems without reversibly changeable mechanical properties.
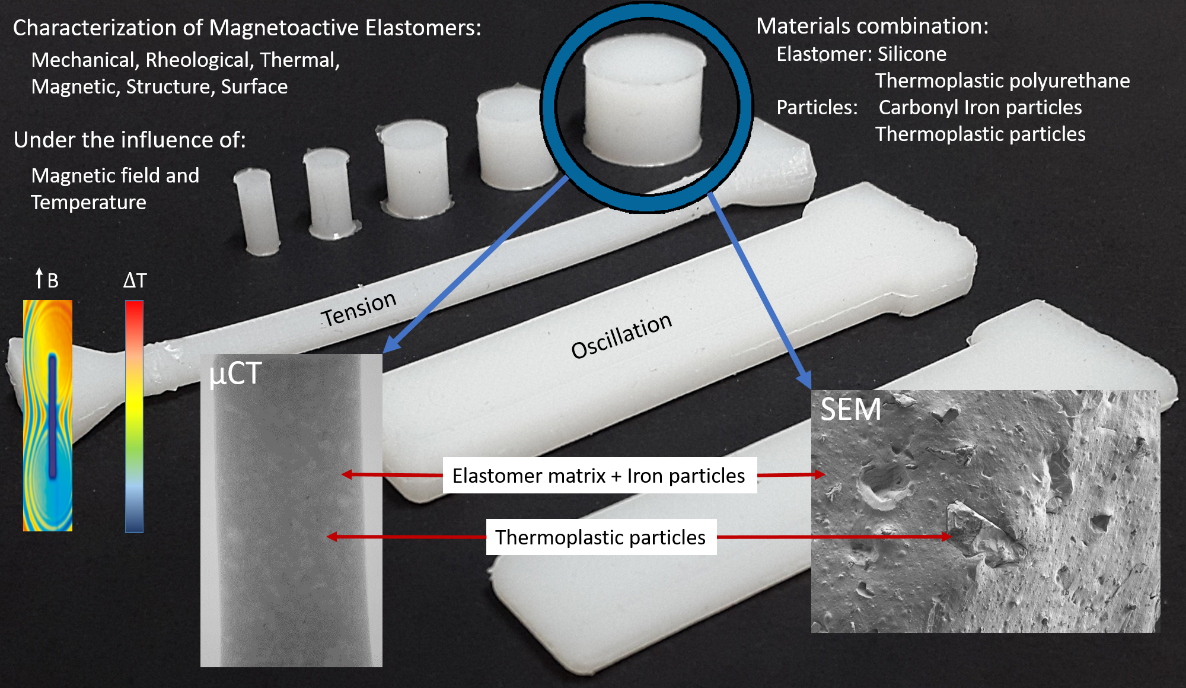
The focus of the proposed investigations is the consideration of the applicability of three material systems in context of soft material robotic systems and their comparative analysis and examination. Magnetic hybrid materials (1) with a thermoplastic elastomer as matrix material, (2) with an elastomer-thermoplastic matrix and (3) with an elastomer matrix and embedded macroscopic thermoplastic inserts will be studied. The emphasis of the first application period lies on the development of methods belonging to the theoretical description of the macroscopic mechanical behavior by providing suitable material models and design tools at different levels of abstraction. This includes experimental characterization of the mechanical material properties with respect to the special features of these materials, such as thermally or magnetically induced stiffness change.
The systematic investigations consisting of material, component and system designs make it possible to find principal application possibilities of such magnetic hybrid materials and enable their targeted use for soft material robotic systems. The intrinsic presence of actuator and sensor capabilities of these material systems implemented with a high level of functional integration can lead to novel and potential grades in the adaptability of soft robotic systems to operational tasks and environmental conditions.