Additionally, there was a Kinect Azure camera placed at a height of ~ 1.2m coarsly over the SICK. For each sample a depth image and a color image have been recorded. The transformation of the camera to the laser scanner has been manually annotated by aligning the range scan and the points of the central depth image line (these were used as a virtual range scan).
Data Format
There are two versions for download. First is the complete dataset including the images, while the second version only comprises the range scans and therefore is much smaller.
The raw data in the respective .zip files consists of separate files for each sample:
- rangescan.xml containing the serialized mira::robot::RangeScan object this basicaly describes the geometry of the scan by:
- a StartAngle, which is the direction of the first laser beam in the scan within LaserFrame coordinates.
- a DeltaAngle, which is the increment of the angle for subsequent scan rays
- a ConeAngle, which is the width of an individual beam
- Furthermore, there are the Range values as a list of distances in meters per scan ray,a Valid flag for each ray (0 - ok, 1-BelowMinimum, 2-AboveMaximum, 3-Invalid), and the Reflectance values provided by the sensor.
- a transforms.xml containing the relative positions of the camera, the SICK range scanner, and the hinge, corner and lock position (labels) all with respect to a reference frame.
- a .png file containing the color image
- a color_intrinsic.xml file describing the actual camera intrinsic parameters of the Kinect color camera
- a .pgm file containing the depth image
- a depth_intrinsic.xml file describing the actual camera intrinsic parameters of the Kinect depth sensor
The door parameters like opening direction and state are provided in the Dataset.csv file, which contains one row for each sample.
The columns are as follows:
| ID | running number |
| color intrinsic | filename of the color_intrinsic file for that sample |
| depth intrinsic | filename of the belonging depth intrinsic file |
| color image | the filename of the belonging color image |
| depth image | the filename of the belonging depth image |
| transforms file | filename of the respective transforms.xml file with all the postition annotations |
| Door State | 1- closed, 2- unlatched, 3- partly open, 4- fully open |
| Opening Direction | 0- left, 1- right |
| RangeScan file | filename of the belonging rangescan.xml file |
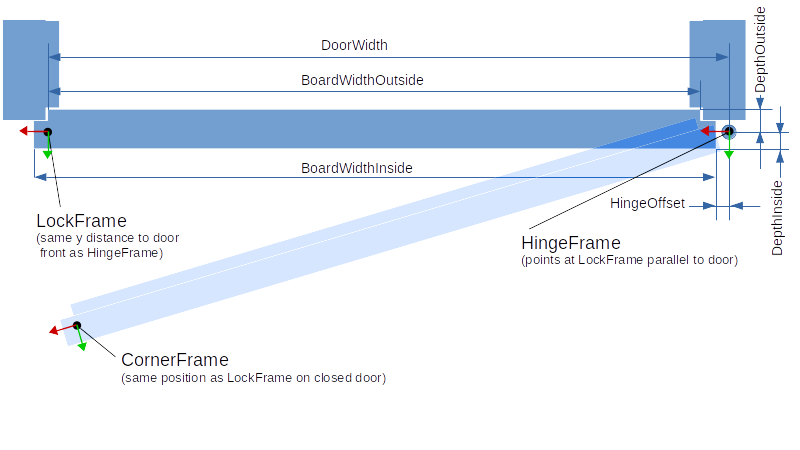
| DepthInside | distance of visible door line to lock hinge baseline [m] |
| DepthOutside | distance of visible door line to lock hinge baseline [m] |
| DoorWidth | distance of hinge and lock [m] |
| BoardWidthInside | width of the door panel on inside [m] |
| BoardWidthOutside | width of the door panel on outside [m] |
| HingeOffset | distance of hinge to the border of the panel on inside |
| DoorID | instance id for each door |
Citations
If you consider using the data sets on this page, please reference the following:
Müller, St., Müller, T., Aamir, A., Gross, H.-M.
Laser-Based Door Localization for Autonomous Mobile Service Robots.
in: Sensors 23 (2023), no. 11, 5247; https://doi.org/10.3390/s23115247
Download
To get access via FTP, please send the completed form by email to nikr-datasets-request@tu-ilmenau.de (for research purposes only).