Description
This data set consists of five continuous sequences with an overall time of 11min 35sec, each containing a guided tour in our office building.
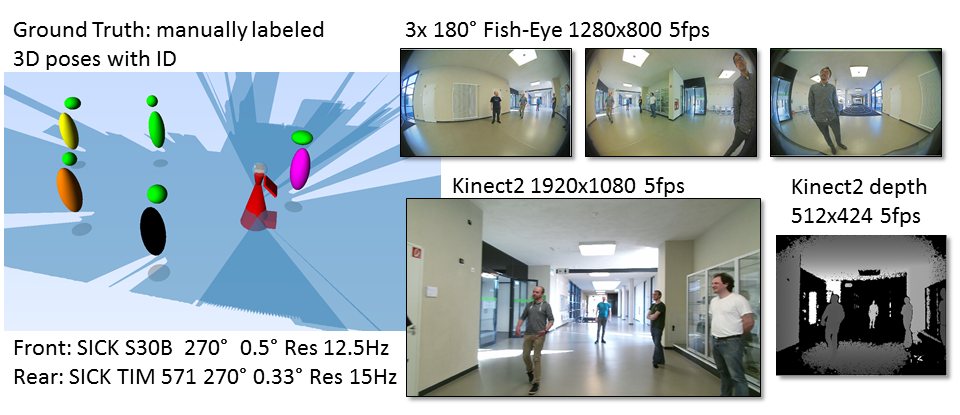
The data is available in the form of ros bags containing sensor readings from two laser sensors (12.5Hz and 15Hz), three fish eye cameras (5Hz) covering 360° of the sourroundings of the robot and one Kinect2 sensor (5Hz).
There are five persons present in average from which one walked behind the robot in a distance of about 3m, while the others randomly walked around and crossed the guided person.
The persons' positions have been manually labeled in 3D world coordinates.
Each person who is visible in at least one sensor has been annotated with their position and orientation, while the IDs are consistent if someone reappears later in a scene.
This also allows the benchmarking of person re-identification on this data set.
The labels have been placed at significant key frames manually and positions and orientation were interpolated for the intermediate frames.