Schwerpunkt Kopter
Kontakt
Nicole Sauer
Fachgebiet IKS
+49 3677 692829
+49 3677 694823 (Fax)
Nicole Sauer
Fachgebiet IKS
+49 3677 692829
+49 3677 694823 (Fax)

Flexible Flug-Plattform für selbstorganisierte outdoor/indoor Anwendungen

Cyber Physical Systems für multiple UAVs
Selbstorganisiertes Verkehrsmanagement und Kollisionsvermeidung für UAV's
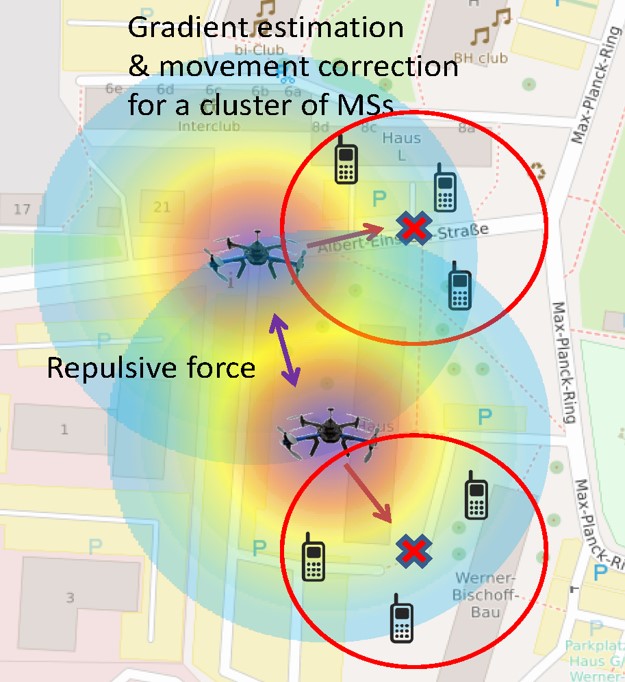
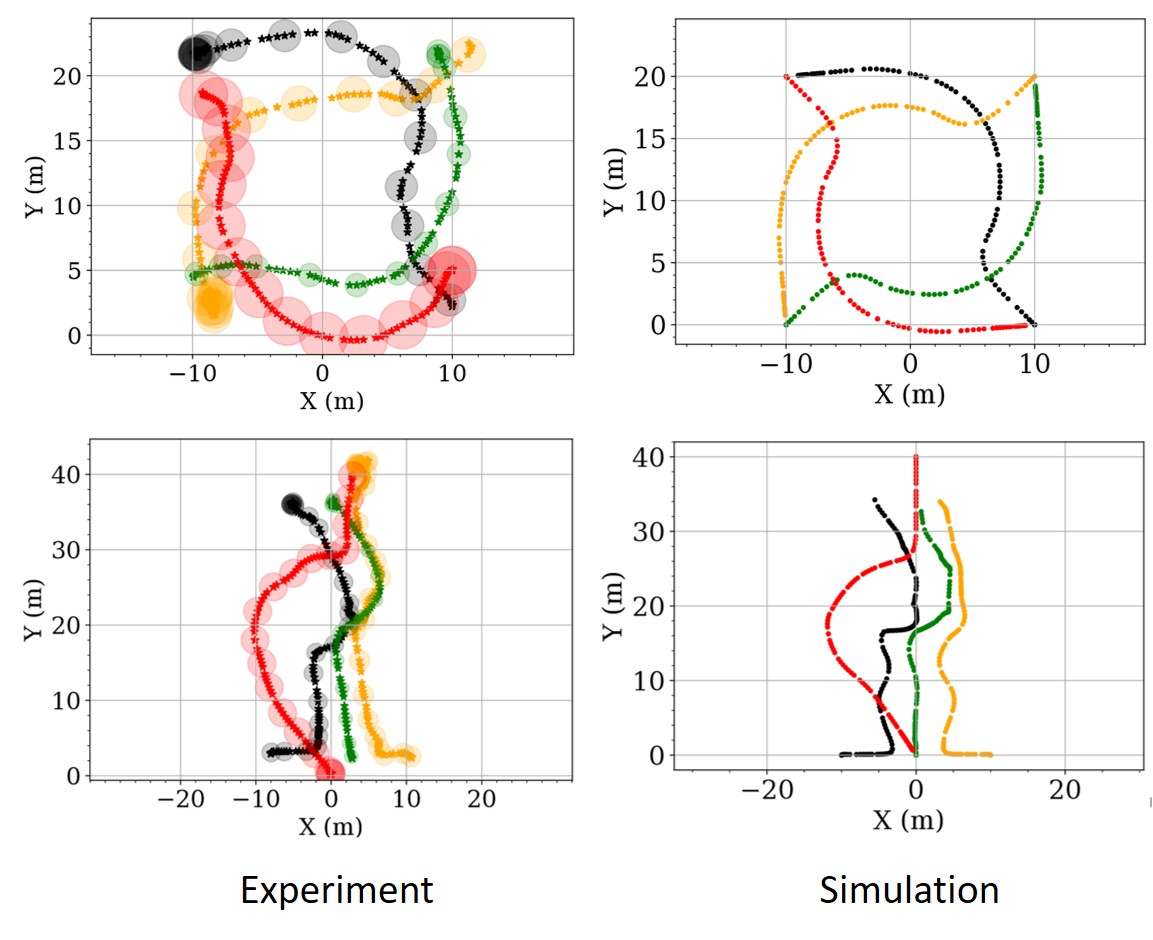
Selbstorganisierte Flugbasisstations-Positionierung
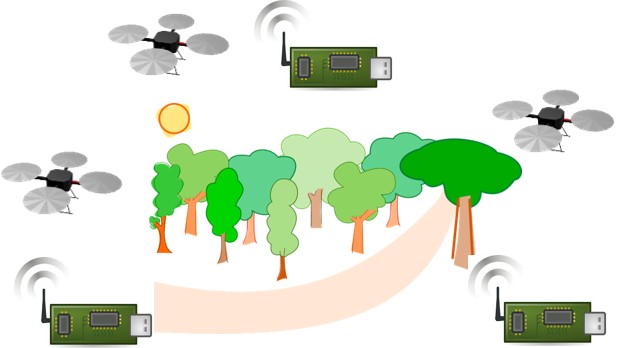
Multi-UAV-basiertes Delay-Tolerant Networking
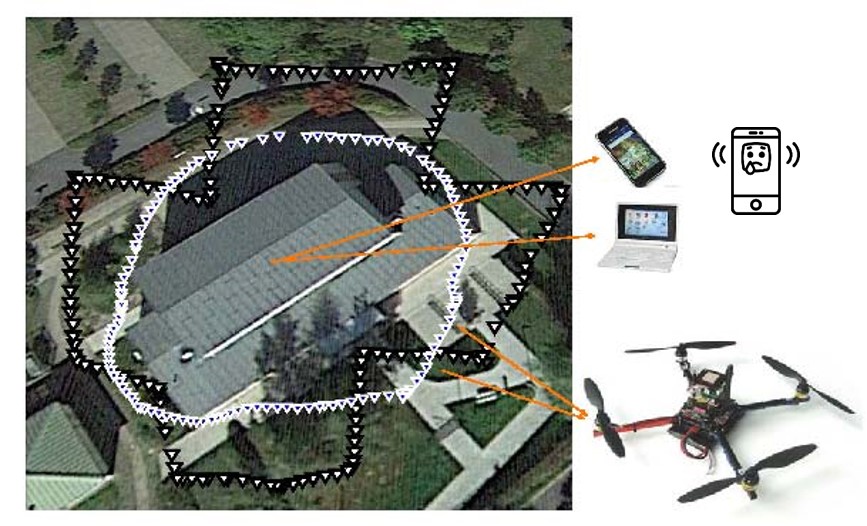
Indoor und Outdoor Lokalisierung von Wireless Devices