Copter Research
Contact
Nicole Sauer
Integrated Communication Systems Group
+49 3677 692829
+49 3677 694823
Nicole Sauer
Integrated Communication Systems Group
+49 3677 692829
+49 3677 694823

Flexible aerial platforms for self-organized outdoor/indoor applications

Cyber Physical Systems for multiple UAVs
Self-organized traffic management and collision avoidance for UAVs
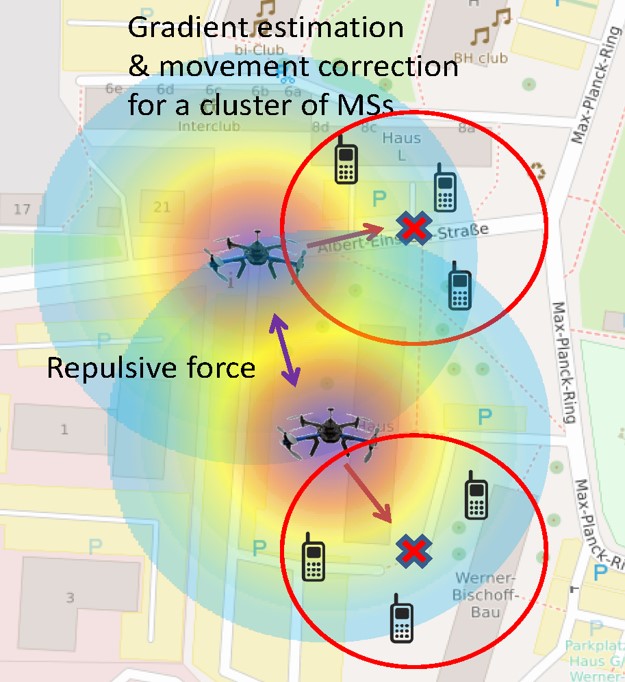
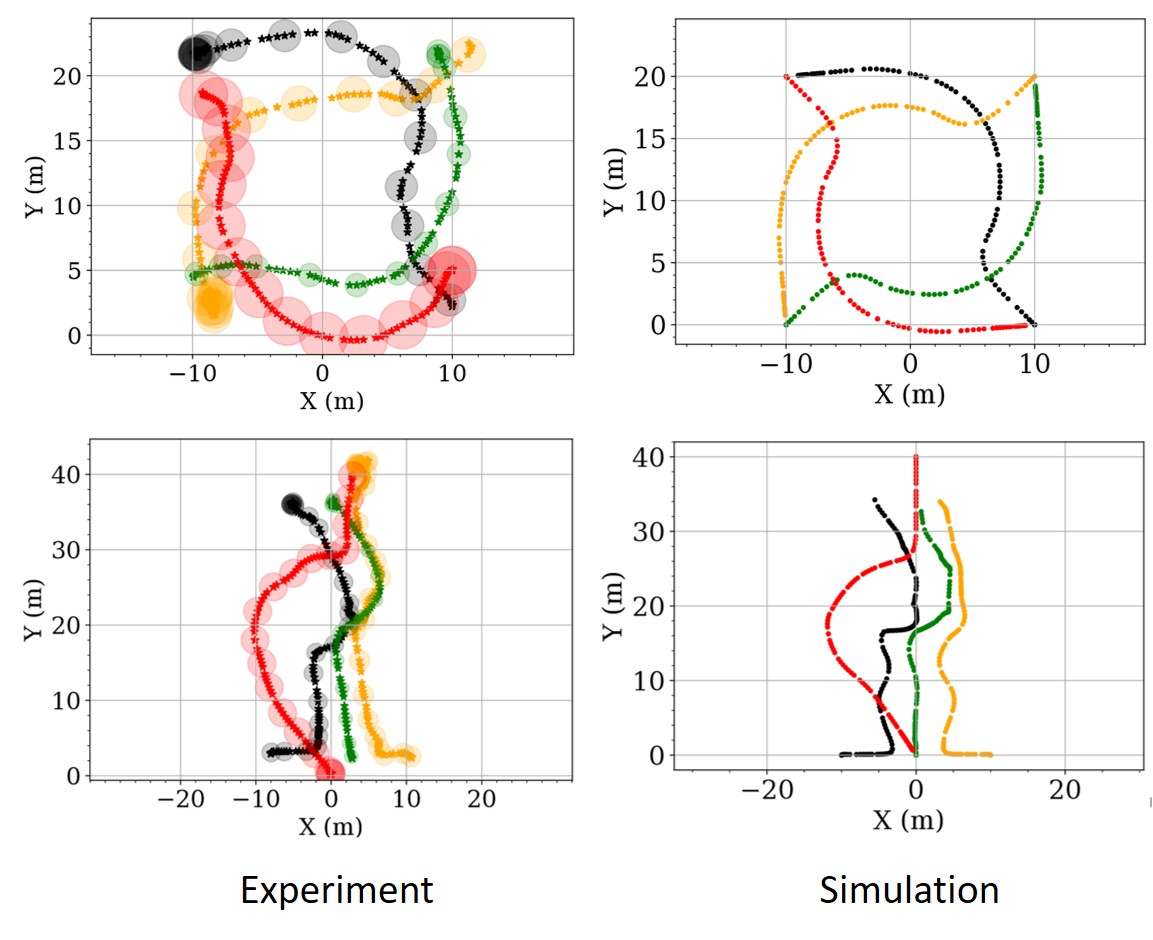
Self-Organized Aerial Base Station Placement
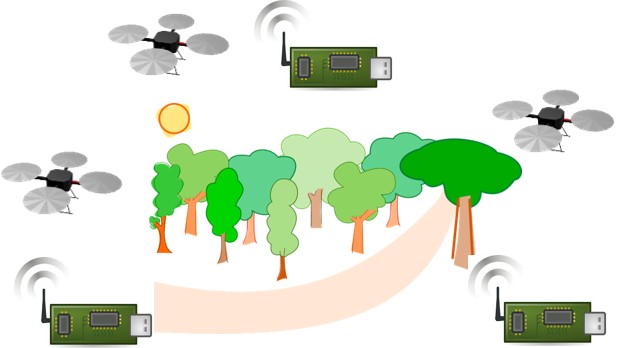
Multi-UAV-based Delay-Tolerant Networking
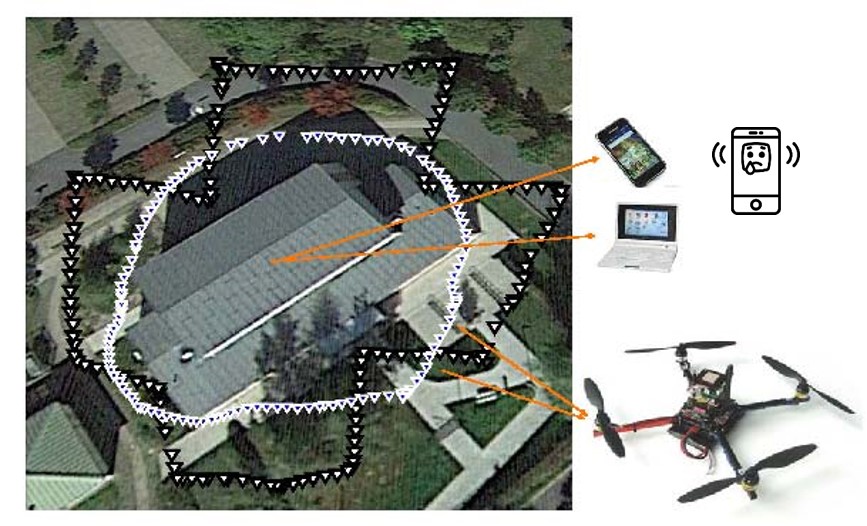
Indoor and Outdoor Localization of Wireless Devices