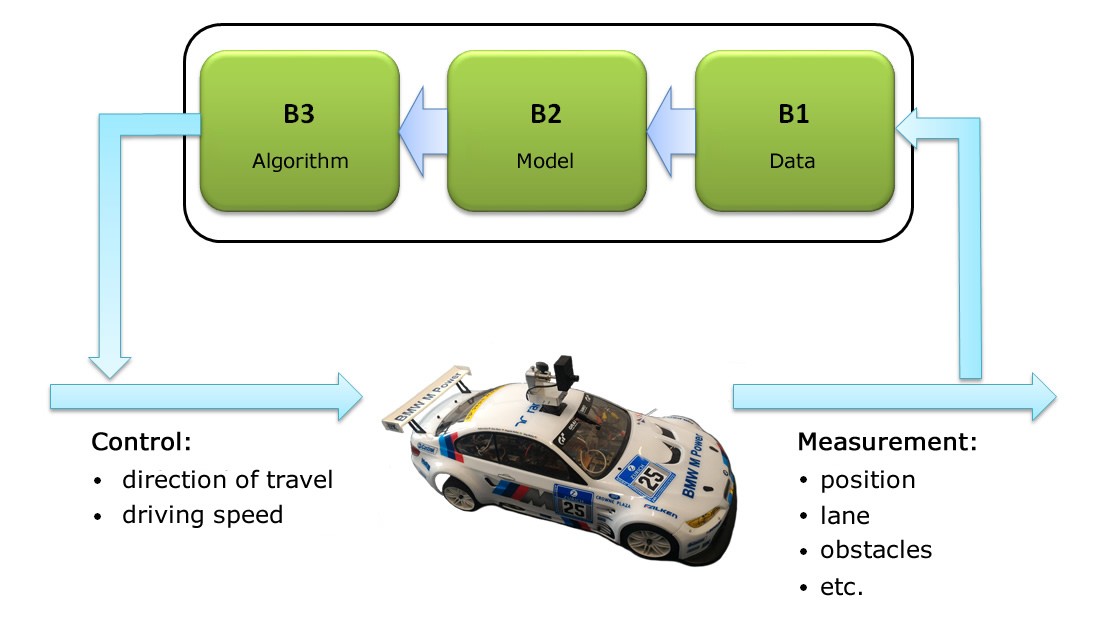
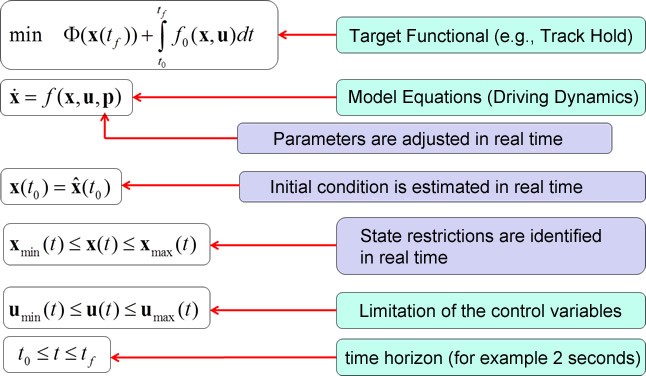
Autonomous driving

Contact
Prof. Dr.-Ing. habil. Pu Li
Head of Department
Technische Universität Ilmenau
Fakultät für Informatik und Automatisierung
Institut für Automatisierungs- und Systemtechnik
Fachgebiet Prozessoptimierung
Helmholtzplatz 5
98693 Ilmenau
Zusebau, room 3008
Phone: +49 3677 69-1423
Fax: +49 3677 69-1434
pu.li@tu-ilmenau.de
www.tu-ilmenau.de/prozessoptimierung